除草机器人内装配摄像头模组主要是为了实现以下几个关键功能,确保其能高效、精准地完成除草任务,同时减少对作物的误伤:
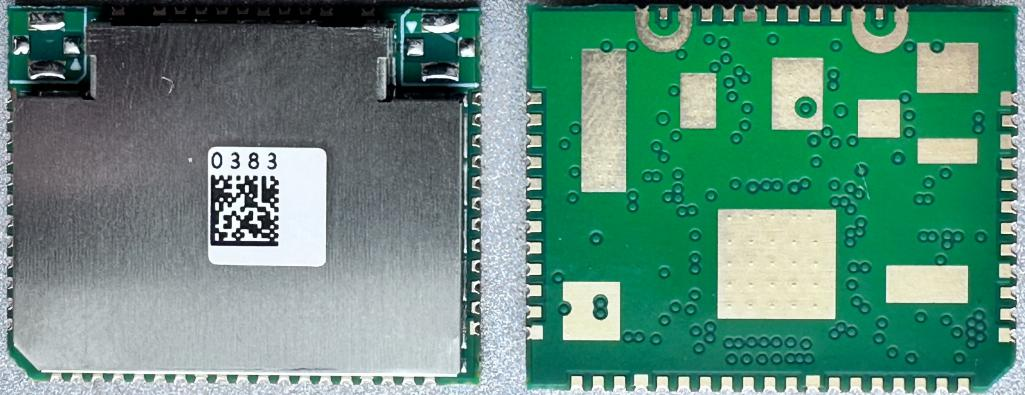
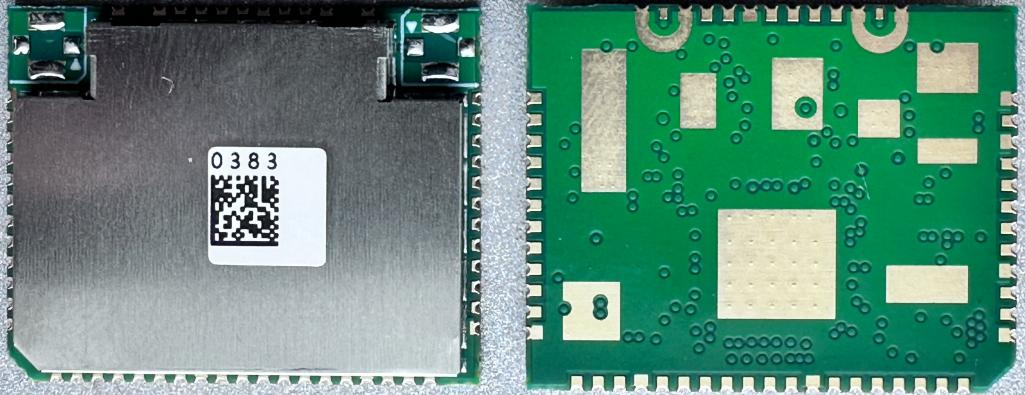
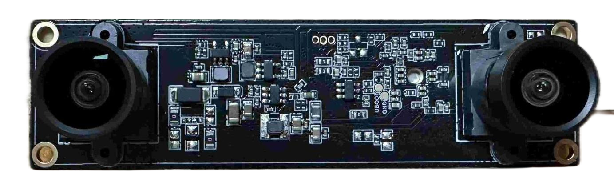
高分辨率摄像头:除草机器人通常装备有高分辨率的摄像头,有时甚至是多摄像头系统,以实现立体视觉或广角覆盖。这些摄像头能够捕捉到田地中作物和杂草的高清图像,为后续的图像分析提供丰富的数据基础。
图像识别技术:结合深度学习和机器视觉技术,摄像头捕捉的图像经过算法处理,能够快速准确地识别出杂草与作物之间的区别。这种技术依据颜色、形状、纹理、生长模式等特征,建立复杂的识别模型,即使在作物和杂草外观相似的情况下也能减少误判。增强除草机器人的分辨能力,以防止出现误判将农作物损毁的情况。
GPS与惯性导航系统:摄像头模组通常与GPS和INS(惯性导航系统)协同工作,实现精确的自我定位。摄像头捕捉地面特征,与卫星地图或预先设定的路径进行匹配,确保机器人在农田中的精确导航,即使在GPS信号不佳的情况下也能维持作业精度。
视觉SLAM技术:部分高端机器人使用摄像头进行即时定位与地图构建(Simultaneous Localization And Mapping, SLAM),通过不断捕捉并分析周边环境的图像,实时更新自身位置,同时构建环境地图,使得机器人能够自主探索未知区域,适应复杂多变的农田环境。
") (除草机器人AI概念图)
(除草机器人AI概念图)障碍物检测:摄像头模组能够检测田间的障碍物,如石头、树枝、灌溉设施等,通过图像分析算法判断障碍物的类型和位置,指导机器人适时避障,减少碰撞风险。避免出现因为各种障碍物或者是路况问题,导致除草机器人被卡住的情况,
地形适应:在不平坦的地形上,摄像头配合其他传感器(如倾斜传感器)可以识别地表的起伏变化,帮助机器人调整行驶速度和除草高度,确保在各种地形条件下都能稳定作业,避免损伤作物或设备。
实时监控:摄像头不仅可以用于作业前的识别和规划,还能在作业过程中实时监控除草效果。通过比较作业前后或不同时间点的图像,可以评估除草的彻底程度,及时调整策略。
数据反馈与学习:机器人收集的图像数据还可以用于后期分析,优化识别算法,提升机器人的智能水平。长期积累的数据有助于机器学习模型的持续训练,使得机器人在面对不同种植条件和杂草种类时,都能保持高效和精准。
无线传输:通过4G/5G移动通讯或Wi-Fi,摄像头模组可以实时传输视频流至云端或用户终端,使农场管理者能在远端监控机器人的工作状态,在除草机器人出现故障或者是其他意外情况时,可以及时的进行调整
交互控制:用户通过手机应用或网页平台,借助摄像头传回的实时画面,可以直观地了解农田状况,甚至远程控制机器人的某些功能,如调整作业路线、启动或停止作业等。
总之,摄像头模组是除草机器人实现智能决策、精准作业和高效管理的关键技术组件,它使机器人拥有了“眼睛”,能够在复杂多变的农业环境中自主、高效地工作,推动了农业向精准化、智能化方向的发展。在提高生产效率的同时,也最大化的做到保护农作物。
长龙鑫精通各类摄像头模组以及电子产品方案开发,有20余年产品开发经验,已经开发出包括200W/500W/800W像素等多种应用场景的专用摄像头模组,提供ODM/OEM加工和芯片选型。各类摄像头模组方案以及电子产品成套开发方案,包括宠物喂食器、宠物饮水机、智能猫砂盆等,有需要可联系我们。
声明:网站文章由长龙鑫电子http://www.clxet.com原创或转载自其他自媒体,引用或转载本文内容请注明来源!
Copyright © 2002-2022 长龙鑫 版权所有 Powered by EyouCms 地址:广东省深圳市宝安区新安街道创业二路 新一代信息技术产业园C座623号 备案号:粤ICP备17052896号 网站地图